|
I DIVERSI TIPI DI
DIFFERENZIALE OPEN - LOCKED - TorSen - LSD |
|
INTRODUZIONE
|
||
|
Il differenziale è stato inventato da
un ingegnere scozzese ormai più di un secolo e mezzo fa, ed è
diventato rapidamente l’elemento chiave del sistema di trasmissione
(o catena cinematica) di ogni veicolo con più di due ruote. I
veicoli stradali utilizzano generalmente un differenziale che
trasmette la coppia motrice generata dal motore (e moltiplicata dal
cambio) a due ruote motrici, permettendo loro di ruotare a velocità
diverse per esempio percorrendo una curva. I veicoli fuoristrada
utilizzano invece due o tre differenziali, oltre che un riduttore
che aumenta ulteriormente il valore della coppia motrice
disponibile. Nei veicoli a trazione integrale permanente vi sono tre
differenziali: uno centrale che ripartisce la coppia motrice ai due
assi anteriore e posteriore, e uno per ogni asse che ripartisce a
sua volta la coppia motrice alla ruota destra e alla ruota sinistra.
In questo modo non solo le ruote da un lato possono ruotare a
velocità diversa da quelle dell’altro lato, ma anche le ruote
anteriori possono ruotare complessivamente a velocità diversa da
quelle posteriori, come è necessario quando si percorre una curva in
buone condizioni di aderenza. Molti veicoli a trazione integrale
inseribile utilizzano solo due differenziali, uno sull’asse
anteriore e uno sull’asse posteriore: in questo modo i due assi sono
vincolati a ruotare alla stessa velocità, e percorrendo una curva le
piccole differenze di velocità di rotazione tra i due assi anteriore
e posteriore dovranno essere assorbite da un leggero slittamento
delle ruote rispetto al fondo stradale.
Si può spiegare questo secondo punto
qui sopra in un modo un po’ diverso. Noi supporremo che “qualcuno”
abbia fatto tutti “gli esperimenti e le misure necessarie” sui
diversi differenziali che considereremo, e che questo “qualcuno” sia
riuscito a condensare tutte le sue misure e scoperte in due,
semplici e chiare Leggi. La Prima Legge descrive come sono legate
tra loro le velocità degli assi condotti e conduttore, e la Seconda
Legge dice come sono legate tra loro le coppie applicate e
disponibili sui tre assi. Conoscendo le due Leggi per un certo tipo
di differenziale non abbiamo bisogno d’altro per fare tutte le
previsioni possibili in merito alle prestazioni di un veicolo
equipaggiato con quel tipo di differenziale.
Noi partiremo da queste Leggi, che non
porremo in discussione poiché rappresentano con ottima
approssimazione per i nostri scopi il funzionamento di un
differenziale reale, e il nostro primo obiettivo è qui di capirne
bene il significato.
Ma talvolta le Leggi si possono
mettere in discussione, e quando si riesce a mettere in discussione
una Legge che tutti credono proprio vera, ebbene, allora è tempo di
rivoluzioni: agli inizi del 1900, qualcuno, ragionando delle leggi
relative a cose semplici come regoli e orologi, ha fatto una bella
rivoluzione… ma non è il nostro caso!
|
||
|
Differenziale “OPEN” |
||
|
Cominciamo ad analizzare il
funzionamento di un differenziale "open". Esso è costituito da un
albero in entrata (albero o asse conduttore) e due alberi in uscita
(alberi o assi condotti) collegati tra loro da un complesso di
ingranaggi tale da distribuire la coppia generata dal motore,
applicata all’albero conduttore, equamente ai due alberi condotti
indipendentemente dalla velocità di rotazione dei due alberi
condotti. Il differenziale tradizionale, chiamato generalmente
“open” (“aperto”) per i motivi che vedremo in seguito, è descritto
da regole (o Leggi) molto semplici, che possiamo riassumere come
segue:
·
Legge
1: La velocità di rotazione dell’albero conduttore è
sempre il valore medio delle velocità degli alberi condotti.
·
Legge
2: La coppia disponibile su ciascuno degli alberi condotti
è sempre la metà di quella applicata all’albero di entrata o
conduttore.
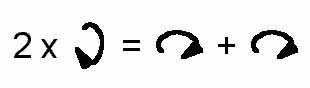
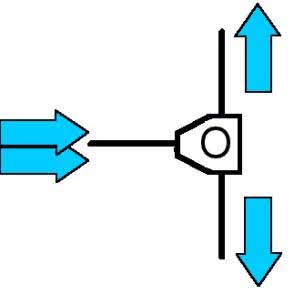
Per facilitare la comprensione delle “Leggi” dei differenziali conviene aiutarsi con una semplice rappresentazione grafica:
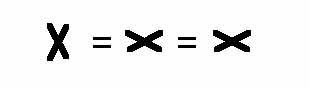
·
indichiamo con una freccia che gira una certa velocità di
rotazione:
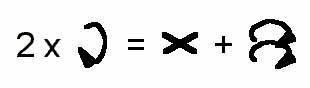
·
con due frecce una velocità di rotazione doppia:
·
mentre useremo una “X” per rappresentare nessuna rotazione:
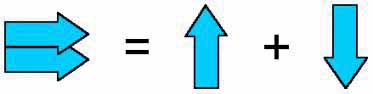
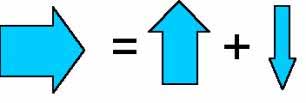
Useremo una freccia spessa per
rappresentare invece la coppia disponibile, o, in modo quasi
equivalente, la trazione disponibile su una ruota collegata a quell'asse,
numericamente ottenuta dividendo la coppia per il raggio di
rotolamento della ruota. Queste quattro frecce rappresentano perciò
quattro unità di coppia o di trazione, a seconda del contesto:
Con questa simbologia possiamo
rappresentare graficamente le leggi dei differenziali, in modo da
capirle e ricordarle meglio. Cominciamo subito col differenziale
"open". Con due semplici passaggi aritmetici scopriamo subito che la
Legge 1 si può enunciare in modo un po’ diverso ma del tutto
equivalente (poiché ottenuto solo con passaggi algebrici):
·
Legge
1.b: Il doppio della velocità di rotazione dell’albero
conduttore è uguale alla somma delle velocità degli alberi condotti.
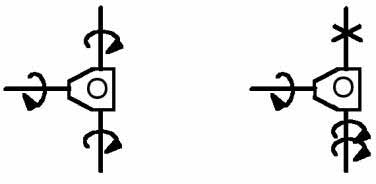
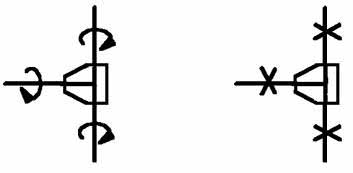
Graficamente rappresentiamo due casi
estremi: a sinistra il caso in cui i due alberi condotti ruotino
alla stessa velocità (per esempio nella marcia in rettilineo), a
destra il caso in cui la trazione su una ruota sia così cattiva da
lasciarla ruotare a vuoto. Mettiamo poi una “O” dentro al
simbolo che rappresenta il differenziale per ricordare che si tratta
di un differenziale "open", e altri simboli intuitivi quando
considereremo altri tipi di differenziale.
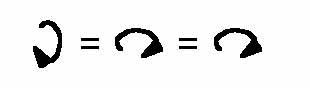
L’applicazione della prima Legge
(versione b!) ci permette di scrivere:
il cui significato dovrebbe essere
ormai ovvio, e facilmente memorizzabile grazie ai disegni
semplificati che abbiamo usato.
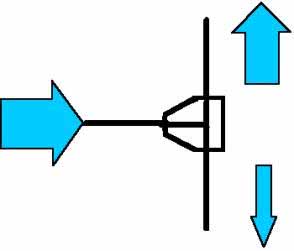
Consideriamo ora una rappresentazione
grafica per la seconda legge:
·
Legge
2: La coppia disponibile su ciascuno degli alberi condotti
è sempre la metà di quella applicata all’albero conduttore.
Possiamo rappresentare questo così:
Per essere precisi, la larghezza della
freccia indica il valore di coppia sull’asse, e la direzione della
freccia rispetto al differenziale indica se l’asse è conduttore o
condotto: frecce entranti indicano assi conduttori e frecce uscenti
indicano assi condotti (queste frecce non indicano vettori!).
Bene, se è tutto chiaro passiamo subito agli altri tipi di differenziali.
|
||
|
Differenziale “LOCKED” |
||
|
Come ogni macchina o meccanismo, il
differenziale “open” non è la soluzione di tutti i problemi: dalle
regole che abbiamo visto sopra la coppia disponibile agli alberi
condotti è sempre uguale, e questa non è una buona cosa in tutte le
situazioni. Per esempio, in condizioni di scarsa aderenza su una
ruota, possiamo applicare ad essa solo una minima coppia se non
vogliamo che la sua velocità di rotazione raggiunga valori tali da
creare rischi di danni meccanici alla catena cinematica, e l’effetto
del differenziale "open" sarà allora quello di trasferire lo stesso
minimo valore di coppia alla ruota in condizioni di buona trazione:
risultato, la coppia totale applicata non sarà sufficiente a far
avanzare il veicolo.
Per ovviare a questo inconveniente,
che può accadere con una certa frequenza su un veicolo con tre
differenziali e in condizioni di scarsa aderenza quali si incontrano
spesso nella guida fuoristrada, sono stati realizzati differenziali
bloccabili (“locked”) nei quali tramite un comando meccanico (o
elettrico o pneumatico) viene azionato all’interno del differenziale
un meccanismo che rende solidale la rotazione dei due assi condotti.
Un differenziale bloccabile è in generale inserito nel blocco del
riduttore dei veicoli a tre differenziali. Nel caso il differenziale
bloccabile sia su uno dei ponti, in caso di perdita di aderenza di
una delle due ruote, il differenziale bloccato la obbliga comunque
ruotare alla stessa velocità della ruota che ha ancora aderenza, e
la coppia motrice viene applicata alle due ruote e scaricata a terra
dalla ruota con più aderenza.
Alcuni differenziali "locked" sono
automatici, e funzionano in modo inverso: i due assi condotti sono
sempre solidali, ma se le condizioni di guida richiedono che una
delle due ruote ruoti più velocemente dell’altra, per esempio
percorrendo una curva, l’asse corrispondente viene “sganciato” e la
ruota può ruotare più velocemente.
Nonostante alcuni differenziali
bloccabili (o sbloccabili) siano meccanicamente abbastanza
complessi, il loro funzionamento è semplicissimo, essendo, quando
bloccato, del tutto analogo a quello di un asse rigido, tipo
go-kart: meccanica semplice, Legge semplice. E infatti un
differenziale "locked" è descritto da una Prima Legge molto
semplice:
·
Legge
1: Le velocità di rotazione degli alberi condotti
sono sempre uguali tra loro e uguali alla velocità di rotazione
dell’albero conduttore.
La seconda differenza rispetto al
differenziale "open" è la Legge relativa al modo in cui la coppia
motrice applicata all’albero conduttore si distribuisce tra gli
alberi condotti: nel caso del differenziale "locked" si ha:
·
Legge 2: La somma della coppia motrice
disponibile sui due assi condotti è uguale alla coppia motrice
applicata all’asse conduttore.
La Legge non ci dice nulla su come va
la coppia motrice su ciascun asse condotto, la coppia su ciascun
asse dipende dalle condizioni di aderenza delle ruote, ovviamente, e
sarà maggiore sull’albero che aziona la ruota avente maggiore
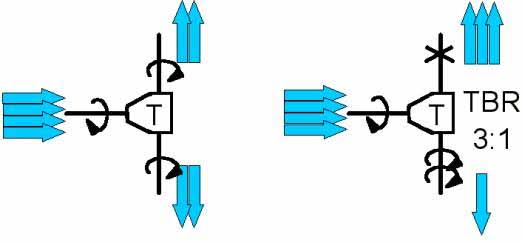
aderenza. Graficamente, supponendo che una ruota abbia più aderenza
e una meno, possiamo adottare questo disegno per ricordare la
Seconda Legge per un differenziale "locked":
Una importante conseguenza la possiamo
trarre immediatamente: mentre gli alberi condotti di un
differenziale "open" sono dimensionati per trasferire senza
eccessiva torsione metà della coppia applicata in ingresso al
differenziale, come specificato dalla Legge 2 dei differenziali
"open", la Legge 2 dei differenziali "locked" non è così
“specifica”, e la coppia su ciascun asse può andare da zero al
valore massimo disponibile sull’asse conduttore. Se ne trae una conclusione molto rilevante agli effetti pratici: gli alberi condotti di un differenziale "locked" devono essere dimensionati per una coppia applicata doppia rispetto a quella considerata per un differenziale "open". In pratica, questo è il motivo per cui adottando su un veicolo un differenziale "locked" di qualunque tipo è necessario sostituire anche gli assi con assi rinforzati. |
||
Differenziali TorSen (Torque Sensing) |
||
|
L’avvento generalizzato
dell’elettronica in campo automobilistico e la diffusione dei
sistemi ABS ha permesso l’introduzione di un’altro metodo per
ovviare al problema del poco controllo sulla distribuzione della
coppia motrice agli assi condotti tipico del differenziale "open".
Il controllo elettronico della trazione, utilizzando i sensori ABS,
applica il freno alla ruota che ruota molto più velocemente
dell’altra sullo stesso asse, cioè a quella che sta slittando: in
questo modo si può dare gas senza problemi e il differenziale "open"
manderà una buona quantità di coppia motrice alla ruota che slitta
(dove però è assorbita dal freno) e alla ruota con trazione, che
provvederà a far muovere il veicolo. Questa soluzione ha come
caratteristica principale una notevole semplicità costruttiva, e un
basso costo nei veicoli che sono equipaggiati con ABS, ed è
certamente efficace. Tuttavia anche essa ha suoi difetti: innanzi
tutto, perché il sistema intervenga, è necessario che una ruota
slitti: questo comporta comunque una perdita di aderenza, e quindi
di trazione, prima che il sistema intervenga, con conseguente
riduzione della velocità del veicolo. Inoltre l’applicazione del
freno sulla ruota con poca aderenza assorbe coppia motrice,
riducendone la quantità disponibile per far avanzare il veicolo.
Infine, su terreni molto scivolosi, il continuo intervento del
sistema può sollecitare pesantemente i freni. Per questi motivi
questo tipo di sistema non è il preferito per i veicoli destinati ad
un pesante uso fuoristrada in condizioni difficili, per quanto la
notevole semplicità meccanica spinga i costruttori ad un uso quanto
più generalizzato possibile.
Con la disponibilità di materiali
nuovi (es. oli che aumentano la viscosità al crescere della
temperatura, guarnizioni d’attrito resistenti alle alte temperature)
e con la possibilità di eseguire lavorazioni di precisione complesse
(quali ingranaggi ipoidi) sono stati concepiti nuovi tipi di
differenziale, allo scopo di ovviare al difetto del differenziale
"open" che abbiamo visto. Vi sono sostanzialmente due famiglie di
differenziali di questo tipo: i differenziali tipo TorSen (Torque
Sensing) e i differenziali LSD (Limited Slip Differential).
TBR = 3
o anche talvolta TBR 1 :
3
al quale viene applicato sull’albero
conduttore una coppia di 2000Nm trasmetterà 500Nm alla ruota che
slitta e 1500Nm alla ruota che ha maggiore trazione. Il vantaggio
rispetto un differenziale "open" è evidente: la ruota che non slitta
riceve una coppia motrice sostanzialmente maggiore, a tutto
beneficio della trazione. Adottando lo stesso linguaggio usato prima
per definire le “Leggi” che descrivono il differenziale TorSen
possiamo esprimere la Legge sulla coppia come:
·
Legge 2: La somma delle
coppie disponibili sugli alberi condotti è sempre uguale a quella
applicata all’albero condotto, ma l’albero che ruota più lentamente
riceve TBR volte più coppia dell’albero che ruota più velocemente.
Graficamente:
Per quanto riguarda la relazione tra
le velocità di rotazione degli assi condotti rispetto all’asse
conduttore, il comportamento del TorSen è del tutto simile al
differenziale "open", e pertanto la Prima Legge è assolutamente
identica:
·
Legge 1: La velocità di rotazione dell’albero conduttore è
sempre il valore medio delle velocità degli alberi condotti
(come in un differenziale ""open"")
%bloccaggio = (TBR - 1) / (TBR + 1)
ad esempio un differenziale con TBR =
3 avrà un coefficiente di bloccaggio del 50%.
Si può dire dunque che un TorSen è una
sorta di compromesso che cerca di mantenere il meglio del
differenziale "open", permettendo agli assi condotti di ruotare a
velocità diverse, e un po’ del buono di un differenziale "locked",
trasmettendo più coppia motrice alla ruota con maggiore trazione,
cosa utile sui terreni con poca aderenza.
Per contro, il TorSen non distribuisce
uniformemente la coppia tra i due assi nelle curve, poiché nelle
curve una ruota gira più velocemente dell’altra, e il TorSen agisce
comunque rispettando al Legge 2: l’effetto è che il guidatore
percepisce una sensazione di auto-raddrizzamento delle ruote,
modesta ma avvertibile. L’altro difetto è che il TorSen non è
completamente bloccante, e quindi quando per esempio una ruota è
completamente sollevata risulta, a differenza di un "locked",
inefficace. Dunque, molto come al solito dipende dall’applicazione
che si ha in mente, ovvero dai terreni sui quali si guida, e vedremo
in seguito un modo per confrontare in modo quantitativo le
caratteristiche di trazione di catene cinematiche con differenziali
di diverso tipo in funzione dell’aderenza del suolo. Comunque,
questa nostra breve analisi ci dà subito alcune indicazioni
pratiche. La prima è che in generale, per minimizzare le reazioni
negative al volante sarà conveniente adottare un TorSen con un TBR
basso sull’asse anteriore, e un TorSen con un TBR maggiore sull’asse
posteriore, che
influenza di meno la guida in curva. Un secondo aspetto pratico è che anche con il TorSen è necessario adottare assi rinforzati, poiché la coppia sull’asse può essere sensibilmente superiore a quella che produce un differenziale "open".
|
||
|
Differenziali LSD (Limited Slip Differential) |
||
|
La quarta grande famiglia di differenziali sono gli LSD (Limited Slip Differential, o Differenziali a Slittamento Limitato). Qui c’è forse la più grande varietà di configurazioni, ed è piuttosto difficile dare delle Leggi semplici e generali come negli altri casi, ma possiamo comunque ricondurre i differenziali a slittamento limitato a due grandi famiglie. In una prima famiglia mettiamo quelli nei quali un qualche “sensore” rileva una differenza di rotazione tra gli assi (slittamento) e attiva un “attuatore” che si oppone almeno in parte a questo slittamento. Un esempio molto semplice è costituito dai giunti viscosi. Essi contengono una serie di dischi, forati o leggermente alettati, immersi in un liquido viscoso (spesso genericamente chiamato “olio”) dalle proprietà particolari: all’aumentare della temperatura questo “olio” anziché ridurre al sua viscosità, come tutti gli oli, la aumenta. Quando i due assi condotti hanno uno slittamento, essi “rimescolano” questo olio, e ne fanno aumentare la temperatura. Ma come la temperatura aumenta, l’olio diventa più viscoso e tende a trascinare insieme i dischi, che in questo modo rimescolano di meno l’olio, che si raffredda e trascina di meno i dischi, e così via finché non si raggiunge un punto di equilibrio in cui gli assi slittano un poco, quel tanto che basta per tenere l’olio abbastanza caldo da permettere solo uno slittamento moderato, ma non così tanto come se il differenziale fosse un autentico "open". Questo caso è un interessante e brillante esempio di ingegneria, poiché l’olio costituisce sia il sensore, rilevando con la sua temperatura la presenza di slittamento tra gli assi, sia l’attuatore poiché aumentando la viscosità tende ad opporsi al fenomeno dello slittamento: più semplice di così! Il principale pregio di questo sistema è il suo costo di produzione relativamente basso, ma in compenso al sua efficacia è modesta, e inoltre richiede la sostituzione periodica dell’olio pena la perdita di efficacia del sistema. Tuttavia c’è una situazione in cui questo tipo di differenziale ha buone prestazioni, ed è come differenziale centrale abbinato a differenziali TorSen o "locked" ai ponti, come vedremo nella terza parte di questa serie.
· Legge 1: La velocità di rotazione dell’albero conduttore è sempre il valore medio delle velocità degli alberi condotti.
· Legge 2: Se è disponibile, l’asse condotto che ruota a velocità minore riceve una quantità fissa di coppia.
|
||
|
|
Pagina redatta da Jos4x4 su materiale divulgato da Land Rover |
|
|
|
||