All’ultima fiera dell’elettronica cui
sono stato, ho trovato dei motori passo-passo bipolari a soli 2 euro. Non ho
resistito e ne ho acquistati un paio. Si pone ora il problema di realizzare un
semplice circuito in grado di mettere in movimento questi motori, giusto per
provare se funzionano. Non ho trovato ancora un’applicazione specifica per il
loro impiego, quindi il progetto della scheda di controllo non ha specifiche o
particolari pretese sulle prestazioni. Anzi l’obiettivo è realizzare un
circuito molto semplice, con componenti economici e facilmente reperibili nel
mercato non professionale. Insomma un qualcosa che permetta di mettere in
rotazione i motori, per sentirli ronzare sul tavolo. In rete si trova un vasta
documentazione sulla teoria e sul controllo dei motori passo-passo. Ma molti
progetti di board si limitano allo schema del solo driver di potenza e spesso
manca la logica necessaria per generare i segnali di controllo. Con questa
esperienza cerco di affrontare le problematiche legate al controllo hardware
sulle fasi del motore, ma anche la gestione del software per gestire le
temporizzazioni dei segnali di comando. Per approfondire la teoria dei motori
passo-passo seguite i link in fondo alla pagina.
I motori
Dalla sigla stampigliata sui motori è
stato possibile risalire alle loro caratteristiche elettriche e meccaniche.
Motore
passo passo MAE, singolo asse, modello HY 200-2215 100A4
Dimensione
flangia 56,4 mm
Angolo
del passo 1,8°
Precisione
angolo passo 5%
Coppia
di tenuta 34Ncm
Corrente
per fase 1 Ampere
Tensione
Vcc 75 Vcc max
Resistenza
fase 3,4 Ohm fase
Induttanza
3,8 mH
Inerzia
del rotore 56 g-cmq
Massa
0,34 Kg
Grafici con performance dinamiche si possono trovare sul
catalogo Pittman-MAE (www.pennmotion.com)
alla sezione motori Stepper con taglia Size 23 (è la dimensione della flangia
da 2,3 inch ovvero 5,8cm) e con la sigla equivalente Y 20 2215 100.
Alimentazione
I motori hanno una resistenza di
avvolgimento molto bassa e una corrente di lavoro massima di 1A, non particolarmente
elevata ma neppure di entità trascurabile. Per poterli alimentare direttamente
servirebbe una sorgente con tensione d’uscita ridotta e con alta disponibilità
in corrente. Una sorgente di questo tipo non è molto comune. A questo proposito
è infatti da notare che gli alimentatori stabilizzati non sono indicati per
queste applicazioni. Durante il funzionamento del motore si generano infatti
delle extratensioni che possono danneggiare in modo irreparabile il regolatore
interno degli alimentatori stabilizzati.Occorre
quindi prevedere una sorgente di alimentazione tollerante ad eventuali picchi di
tensione che si generano sulle fasi del motore durante le commutazioni di
corrente sulle fasi. Per questi motivi, ed in base alla disponibilità di
componenti a mia disposizione, ho scelto di utilizzare un alimentatore classico
con trasformatore seguito dal solito ponte a diodi e condensatore di filtro, con
la disponibilità di 1A in corrente.
Drivers
Bipolari
Per controllare modulo e verso delle correnti nelle due fasi del motore servono due ponti ad H.
In commercio esistono numerosi
integrati per questo tipo di applicazione. Questi dispositivi costano poco e semplificano
l’implementazione circuitale del doppio ponte. Tra i driver integrati di
taglia adatta al motore da controllare, ho scelto quelli più facili da
reperire, che si potessero trovare ad esempio su molti i siti di componenti per robotica
amatoriale.
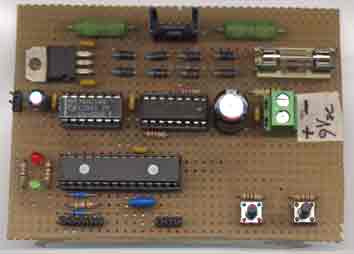
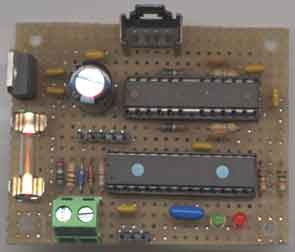
Ho realizzato due
progetti molto simili tra loro. Le differenze riguardano il tipo di driver
utilizzato: nel primo progetto e' un SN754410, della Texas Instruments, nel secondo c'e' un integrato
UDN2916B della Allegro Microsystems.
Da notare che,
per entrambi i progetti, i dispositivi driver possono, se utilizzati per lungo
tempo, aumentare in modo sensibile la loro temperatura. In caso di utilizzo in
condizioni critiche occorre prendere precauzioni. In questa evenienza prestare
attenzione ai consigli riportati sui fogli tecnici.
Conclusioni
Con questi driver
è possibile comandare uno stepper bipolare con estrema facilità, realizzando
circuiti molto compatti. Per comandare motori più grossi, con correnti
superiori a 1A, occorre orientarsi verso dispositivi con package. In questo
progetto utilizzo la nota coppia di integrati L297 e L298,