

Effetto ipersostentatori sulla Polare

1 Forze e Resistenze
2 Ipersostentatori
3 VORU
4 Regime motore
5 Variazioni parametri e VORU
6 Stallo e Fattore di carico
7 Salita
8 Vx e Vy
9 Discesa

Nello studio degli assetti di volo i punti di applicazione si considerano tutti coincidenti.
Nota: la portanza e' generata unicamente dall'ala pertanto il grafico di Cp esprime completamente i comportamenti dell'A/M nella direzione della portanza. La resistenza non e' unicamente quella dell’ala, di conseguenza l’andamento di Cr non esprime completamente il comportamento della resistenza dell'A/M.



Slat/Slot
-Ipersostentatori di bordo di attacco.
-Aumentano relativamente poco il Cp ma aumentano l'incidenza di stallo.
-Moderato aumento di Cr e diminuzione di E.
-A basse incidenze potrebbero addirittura diminuire il Cp.
-Pitch up
Differenze:
Slat:
-Trasforma il profilo in concavo convesso e quindi problema stallo
Slot
-Diminuiva la portanza a basse incidenze ed era meno efficace
Flap
-Ipersostentatore di bordo di uscita.
-Riduzione di Vs per notevole aumento di Cp a parità di incidenza , ma aumento di Cp max, diminuzione dell'incidenza max di stallo.
-Notevole aumento di Cr e considerevole diminuzione di E.
-Trasforma l'ala in concavo convessa.
-Pitch down
Andamenti con ipersostentatori Cp e Cr
Effetto ipersostentatori sulla Polare

equazione della sostentazione P=Q equazione della propulsione T=R
Le Quattro forze sono legate fra loro e tramite queste equazioni esprimono gli equilibri durante il volo.
Data una velocità di corcera c’é corrispondenza biunivoca fra spinta necessaria al VORU e peso:
Q=P=1/2 rV2 S Cp ha come unica variabile Cp; dalla polare ho che per un Cp
corrisponde un solo Cr.
R=T=1/2 rV2 S Cr Quindi corrisponde una sola trazione.
Trazione e resistenza

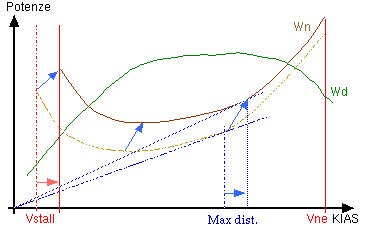
Potenza necessaria e disponibile
-Wd erogata dal motore e' legata alla trazione ed alla velocita' dell’A/M:
Per il voru l'A/M e' in equilibrio: T=R; P=Q; e Wn=Wd

Il VORU e' ottenuto in soli due punti, che sono sempre uno nel I regime o in equilibrio, l'altro nel secondo in equilibrio instabile.
Massima autonomia oraria: punto nel quale, riducendo la Wd, si arriva ad un solo punto di intersezione fra Wd e Wn. In quel punto si ottiene il VORU con la minima Wd e quindi con il minimo consumo, il massimo tempo di permanenza in volo.
Massima autonomia chilometrica: punto nel quale il rapporto fra velocita' e Wd e' massimo, si percorre la massima distanza. Notare che questo e' il punto di minima resistenza.
Regime motore
I regime
-Regime di stabilità propulsiva
-Regime veloce
-Direct command
II regime
-Regime di instabilita' propulsiva
-Regime lento
-Reverse command
Se il peso aumenta:
AUMENTA
-Velocità di stallo
Velocità di massima efficenza
Potenza necessaria al VORU
COSTANTE
Efficenza (e' propria dell'ala Cp/Cr)

Quota di tangenza teorica - Absolute cieling
E’ la quota alla quale La riduzione di Wd é tale da intersecare la curva delle Wn in un solo punto. Tale punto é locicamente la Vmax autonomia oraria.
Quota di tangenza pratica - Service cieling
E’ la quota alla quale rimane un supero di potenza che permetterebbe all'A/M di salire con 100ft/min al variometro.
Essendo comunque necessario rapportare il volo allo spostamento rispetto al suolo e' interessante osservare il comportamento in VORU al variare della quota rispetto alla TAS:

Essendo la IAS di massima autonomia chilometrica costante, la TAS di massima autonomia chilometrica aumenta con la quota.
Tabella riassuntiva per le variazioni

La velocita’ di stallo e’ al VORU con incidenza critica, e quindi con Cp max. Dall'equazione della sostentazione:
Q=P=1/2 rV2 S Cp esprimendo V in funzione delle altre variabili:

Fattore di carico
Il fattore di carico rappresenta la forza portante generata dall’ala. E' il rapporto fra peso apparente dell'A/M e effettivo peso.

Il fattore di carico oltre ad essere l’indice dello sforzo dell’ala da la velocità di stallo:


-angolo di rampa: b
>Angolo misurato dall'orizzonte alla traiettoria dell'A/M.
-angolo di assetto: A
Angolo misurato dall'orizzonte all'asse longitudinale dell'A/M. E' l'angono dell'orizzonte artificiale.
-Angolo di calettamento: a
Angolo con il quale e' stata montata l'ala rispetto all'asse longitudinale dell'A/M.

-equazione sostentamento: P=Q cos b
-equazione propulsione: T=R+Q sin b
In una salita stabilizzata con traiettoria retta percorsa a velocita' costante P e' inferiore a Q, ovvero n<1.

Determinazione di Vx
Vx da il max(b). Essendo T=R+Q sin b si ha:

La velocita' di salita ripida la si ha quando il supero di trazione e' massimo.
Variazioni di Vx
-Aumento di peso:
Come per la Vy l'aumento di Cp per compensare il peso provoca Cr superiori. La Vx aumenta e la Vz é inferiore. Graficamente R aumenta ed il supero di trazione diminuisce.
-Aumento di quota:
Diminuendo la trazione, il supero massimo di trazione lo si ottiene a velocita' piu' basse, Vx diminuisce con la quota avvicinandosi allo stallo.
-Estensione ipersostentatori:
Come per i grafici corrispondenti al VORU l’estensione dei flaps sposta la curva delle R in alto e a sinistra visto che riduce la Vs. Ne risulta che T-R diminuisce e il supero massimo di trazione si ha ad un valore minore.
Determinazione di Vy
Vy da il max(Vz). Moltiplicando l’equazione della propulsione per Vy:
T Vy=R Vy+Q Vy sin b si ha: Wd=Wn+Q Vz e quindi:

La velocita' di salita rapida la si ha quando il supero di potenza e' massimo.
In genere il supero di potenza massimo si trova vicino alla velocità di massima autonomia oraria, ma gli A/M con elica a passo fisso potrabbero avere il supero di potenza massimo vicino alla velocità di crocera.
Variazioni di Vy
-Aumento di peso:
Come per la Vx l'aumento di Cp per compensare il peso provoca Cr superiori. La Vy aumenta e la Vz é inferiore. Graficamente Wn aumenta ed il supero di potenza diminuisce.
-Aumento di quota
Diminuendo la paotenza disponibile se il supero massimo di potenza si trovava in prossimita' della velocita' di massima autonomia oraria, Vy non cambia, ma Vz diminuisce, infatti la velocita' Vy prossima alla massima autonomia oraria e’ la velocita' da mantenere per il VORU alla quota di tangenza.
-Estensione dei Flaps:
Come per i grafici corrispondenti al VORU l’estensione dei flaps sposta la curva delle Wn in alto e a sinistra poiche’ riduce la Vs. Rimanendo Wd costante la Vy diminuisce ed anche il supero, quindi diminuisce anche la velocita’ variometrica.
E' la curva che mette in corrispondenza le velocita' verticali dell’A/M alle velocita' orizzontali. Le coordinate polari di tale curva corrispondono all'angono di rampa e la IAS.

Tabella riassuntiva per Vx e Vy alle variazioni di parametri

Discesa assistita
In questo caso T-R < 0 ovvero Wd < Wn. Ma dato che Wd aumenta scendendo si rishia di arrivare ad una quota dove Wd=Wn e quindi la discesa termina.
Lungo lo stesso glide l'A/M più pesante ha tendenza a scendere piu' velocemente dovutamente al fatto che la componente Qsin b e' maggiore e quindi serve meno T per equilibrare R.
Discesa planata
In questo caso T=0 e quindi R=Q sin b.
Essendo l'efficenza sempre costante la distanza di planata sara' la stessa per qualsiasi peso. La velocita' di efficenza massima aumenterà all'aumentare del peso.
Per ottenere un qualsiasi angolo di planata differente dalla palnata a massima efficenza si possono secgliere sempre due velocita': una nel I e l'altra nel II regime. In genere se si tratta di un avvicinamento si scele una velocita' lenta nel campo dei reverse command.